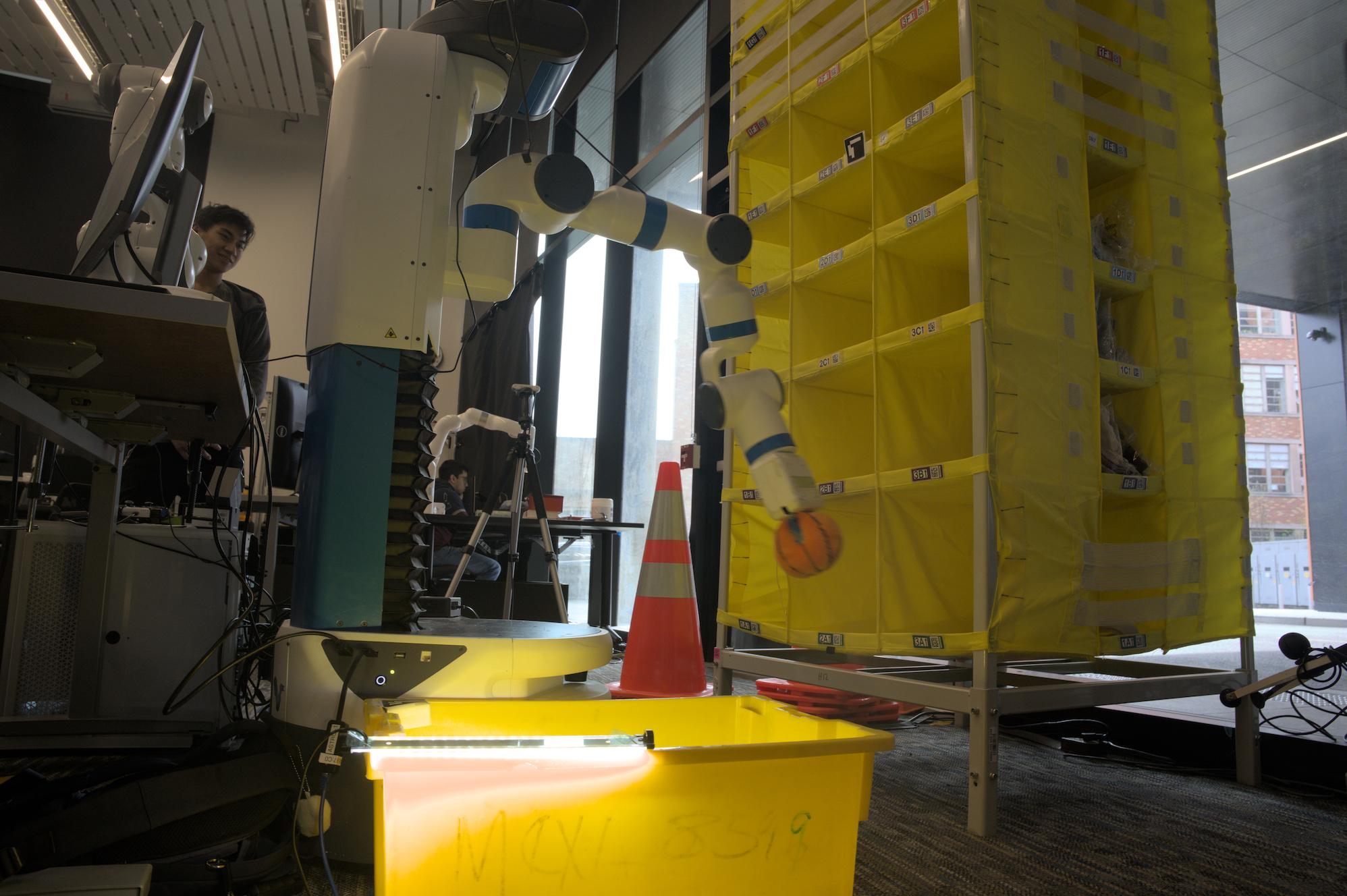
For industrial warehouses to be fully automated, robots must be able to pick previously unseen objects from densely packed shelves. Dense packing makes objects more difficult to distinguish visually and requires manipulation to be sensitive to the arrangement of objects in the shelf itself. Hence, key challenges that arise are the visual segmentation and tracking of previously unseen objects in cluttered environments, as well as manipulation planning and control to pick densely packed objects from the shelf. This Amazon sponsored research project deals with picking unseen objects from a cluttered shelf.